近日⛴,万事平台機自學院機自系副教授李靜及其團隊🏺,在SCI一區(工程:機械)TOP期刊《Mechanism and Machine Theory》(MMT,CS=4.48🔔,IF=3.535)上發表了題為“Dimensional synthesis of a 5-DOF hybrid robot”的論文🚵🏽♀️,万事平台為論文第一單位,李靜老師為論文第一作者🤵🏻,沈南燕老師為通訊作者🦸🏼♂️,研究生葉飛為論文第二作者👰🏼♂️。
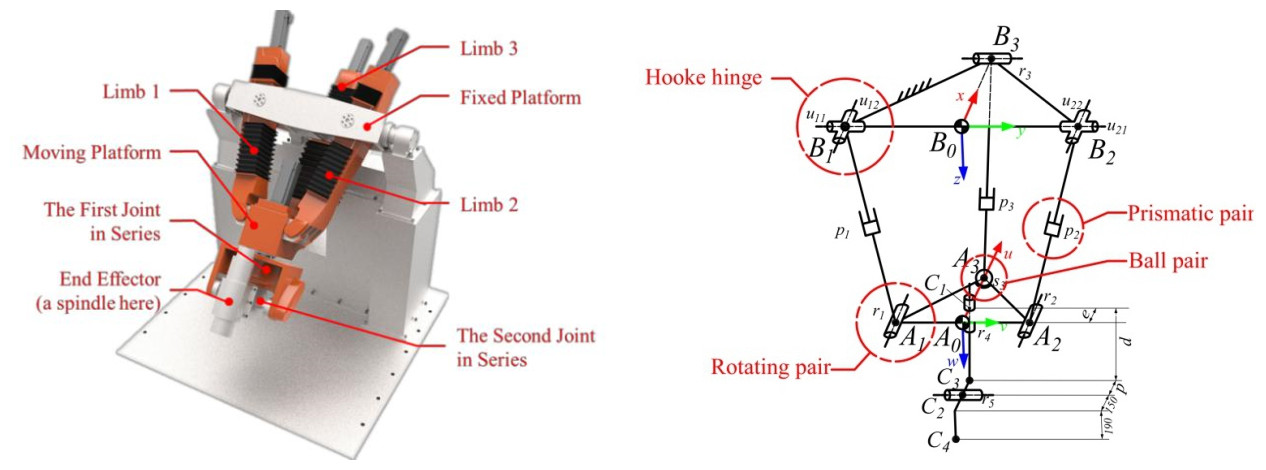
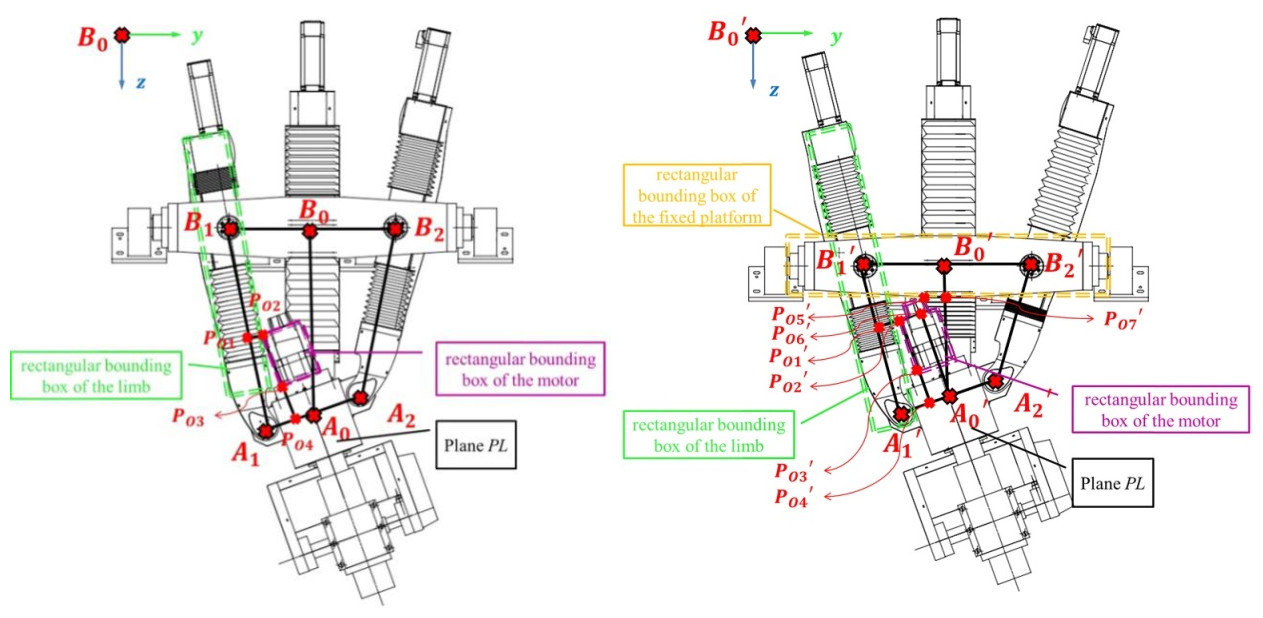
在本文中,作者基於一種五自由度混聯機器人🏧,對與性能密切相關的機器人結構參數進行了優化設計👨🏿🌾。混聯機器人結合了並聯機器人🕸🙍♀️、串聯機器人的結構和性能特點,在機械加工方面具有良好的應用前景。作者從運動範圍、剛度和運動性能的角度,提出了一種更全面、更合理👭🏻、更符合實際的參數優化設計方法。作者構造了基於包圍盒理論的無幹涉的運動範圍指標,並設計了基於並聯結構剛度修正模型的最大和最小剛度值指標,以及基於條件數的綜合運動性能指標📎🤾🏻。此外,作者從安裝條件、關節運動和載荷限製、數據有效性方面約束了結構參數優化的可行區域。優化結果表明,具有更好運動範圍的結構參數方案具有更高的優先級。作者進一步分析了優化結果中的結構參數和優化目標之間的相關性,以指導優化模型的改進。作者的研究成果為該混聯機器人的詳細設計和樣機實現奠定了基礎🌾✡️,同時也為其他結構的混聯機器人的參數設計提供了參考⚁⛸。